El módulo sensor de voltaje FZ0430 es un módulo bastante simple, el cual consiste en un divisor de tensión conformado por dos resistores uno de 7.5K y uno de 30K, con el cual podremos ser capaces de reducir el voltaje medido en una razón de 0.2 y por lo tanto seremos capaces de medir una tensión máxima de 25 V con procesador de 5V y 16.5 V con un procesador de 3.3V.
Debido a su forma de funcionamiento, con este módulo sólo podemos medir tensión DC, para medir AC tendríamos que primero rectificar la tensión. El módulo cuenta con 2 bornes donde se debe conectar la tensión a medir, los cuales tienen polaridad, así mismo cuenta con 3 pines, lo cuales son:
+ = Referencia positiva de 3.3 a 5V
- = Referencia negativa
S = Señal
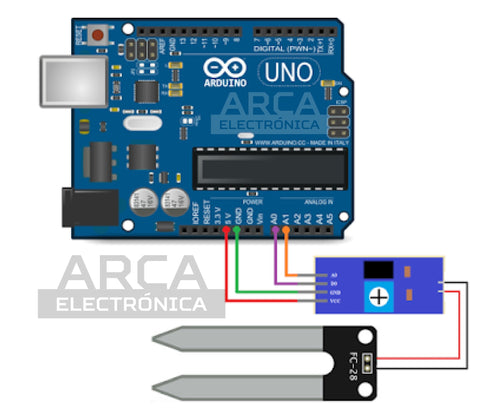
A continuación mostramos un ejemplo donde utilizamos el sensor de voltaje para medir la tensión en una carga y la desplegamos en el monitor serial del Arduino.
Esquema de conexión Arduino UNO

Código Arduino
int Sensor = A0;
void setup() {
Serial.begin(9600);
}
void loop() {
float voltaje = (float)25*analogRead(A0)/1023;
Serial.print("Voltaje medido = ");
Serial.println(voltaje);
delay(500);
}
Al subir el código al Arduino y al abrir el monitor serial, podremos ser capaces de medir la tensión con nuestro módulo.
FIN DEL POST
void setup() {
Serial.begin(9600);
}
void loop() {
float voltaje = (float)25*analogRead(A0)/1023;
Serial.print("Voltaje medido = ");
Serial.println(voltaje);
delay(500);
}
Al subir el código al Arduino y al abrir el monitor serial, podremos ser capaces de medir la tensión con nuestro módulo.
FIN DEL POST